Hoe het MKB een industriële metaverse kan gebruiken om snel robotoplossingen te verkennen en te implementeren
Bijgedragen door De Noord-Amerikaanse redacteurs van DigiKey
2024-11-21
Robots en collaboratieve robots (cobots) staan aan de spits van de technologieën voor fabrieksautomatisering. Digital twins en virtual reality (VR) zijn toonaangevend op het gebied van ontwerp- en ontwikkelingstools. Gecombineerd kunnen ze worden ingezet om een industriële metaverse te creëren die sneller een hogere productiviteit oplevert, zelfs voor kleine tot middelgrote ondernemingen (KMO's).
Ontwerpers in het MKB kunnen profiteren van een eenvoudige en intuïtieve interface die een digitale tweeling combineert met een zeer gedetailleerd virtueel model van een fysiek object zoals een delta-, lineaire of meerassige robot en een driedimensionale (3D) VR-omgeving om de bewegingssequenties van de robot direct uit te voeren en te controleren.
Het gebruik van deze functies ondersteunt de fijnafstemming en optimalisatie van het automatiseringssysteem, zelfs zonder fysieke hardware, en maakt een snelle verkenning van meerdere oplossingsmogelijkheden mogelijk.
Dit artikel bespreekt eerst het onderscheid tussen een wiskundige, door gegevens beschreven digitale tweeling en een visuele digitale tweeling (VR-tweeling) en hoe beide nodig zijn om de industriële metaverse te creëren. Vervolgens wordt een robotbesturingssysteem en bijbehorende software van Igus gepresenteerd waarmee een robot gesimuleerd kan worden op een 3D-interface (visuele digitale tweeling) zonder fysieke hardware te gebruiken, samen met compatibele delta-, lineaire en meerassige robots die gebruikt kunnen worden om de geoptimaliseerde oplossing te realiseren.
Digital twins en VR zijn complementaire technologieën die gebruik maken van verschillende visualisatievormen, interacties en hardware. Digital twins zijn op gegevens gebaseerde modellen van fysieke objecten, systemen of processen. Ze zijn ontworpen om gebruikt te worden over de gehele levenscyclus van het gemodelleerde item, van het eerste ontwerp tot de ontmanteling en recycling.
VR is een meeslepende, visuele technologie die ook gebruik maakt van digitale modellen. In een VR-omgeving is het mogelijk om de relaties en interacties tussen objecten te simuleren, zoals een robot die een taak uitvoert. Hoewel beide technologieën kunnen worden gebruikt voor ontwerp en simulatie, is de digital twin-technologie gericht op overwegingen met betrekking tot de totale levenscyclus, terwijl VR zich richt op interacties tussen fysieke objecten.
Een metaverse combineert digitale tweelingen en VR in een speciaal gebouwde virtuele omgeving die realtime interacties tussen de digitale objecten en mensen ondersteunt. Het wordt vaak geassocieerd met gaming, maar wordt ook steeds meer toegepast op zakelijke en industriële activiteiten.
Welkom in de iguverse
Igus heeft de iguverse metaverse ontwikkeld om engineeringinteracties in industriële omgevingen te ondersteunen, zoals het ontwikkelen en inzetten van robotsystemen. De iguverse kan worden geïmplementeerd via de Igus Robot Control (iRC) software. Met deze gratis en licentievrije toepassing kunnen gebruikers verschillende soorten robots besturen, waaronder deltarobots, cobots (robotarmen) en portaalrobots.
Het biedt gebruikers een 3D-interface en meer dan 100 voorbeeldprogramma's. Systeemvereisten om iRC te implementeren zijn onder andere een pc (minimaal een Intel i5 CPU) met Windows 10 of 11 (64-bits) met 500 MB vrije schijfruimte en een ethernet- of draadloze netwerkverbinding.
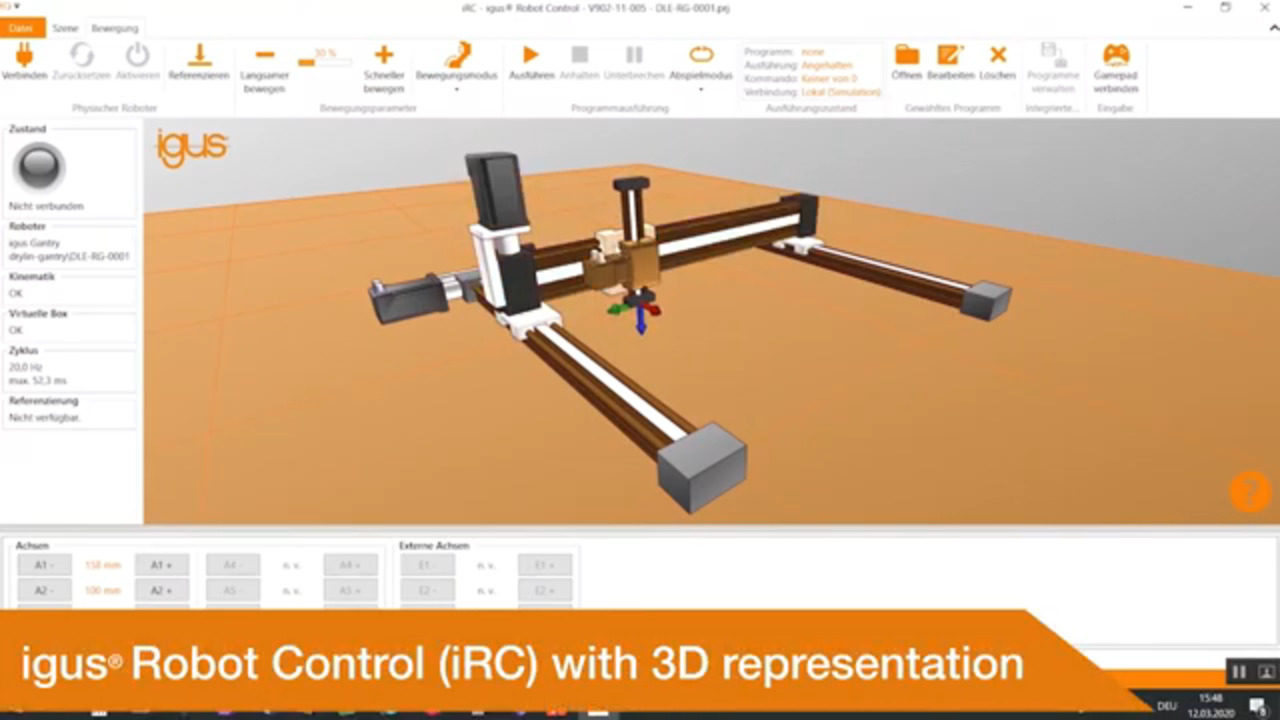
De kern van de software is een 3D digitale tweeling van de robot die geprogrammeerd wordt. Een voorbeeld hiervan is een drieassige lineaire portaalrobot zoals model DLE-RG-0001-AC-500-500-100 met een werkruimte van 500 x 500 x 100 mm of een tweeassige xy-actuator zoals model DLE-LG-0012-AC-800-500 met een werkruimte van 800 x 500 mm (Afbeelding 1). Ontwerpers kunnen bewegingen definiëren met een paar muisklikken en het 3D-model gebruiken om ervoor te zorgen dat de vereiste bewegingen haalbaar zijn, zelfs voordat ze de robot aanschaffen.
 Afbeelding 1: Voorbeeld van een 3D VR digital twin van een drieassige portaalrobot in het iguverse. (Bron afbeelding: Igus)
Afbeelding 1: Voorbeeld van een 3D VR digital twin van een drieassige portaalrobot in het iguverse. (Bron afbeelding: Igus)
Naast de iRC software is de robotbesturing een belangrijk element in de iguverse ontwikkelomgeving. Het model IRC-LG12-02000 is bijvoorbeeld voor 48 V motoren, heeft zeven ingangen en zeven uitgangen en heeft een kabel van 10 m voor aansluiting op de robot. De IRC-besturingen bevatten motoraandrijvingsmodules voor bipolaire stappenmotors van verschillende grootten en zijn configureerbaar of vooraf geconfigureerd verkrijgbaar. Het heeft ook verschillende interfaces voor systeemintegratie, waaronder:
- Programmeerbare logische controller (PLC) interface voor besturing via de digitale in- en uitgangen, met name voor het eenvoudig starten en stoppen van programma's via een PLC of drukknop
- Modbus TCP-interface voor besturing via een PLC of pc
- Common Robotic Interface (CRI) Ethernet voor besturing en configuratie met een PLC of pc
- Robot Operating System (ROS)-interface voor het bedienen van de robot met ROS
- Interface voor objectdetectiecamera's
- Cloudinterface voor het op afstand bewaken van de status van de robot
Ondersteunde kinematica
Een verscheidenheid aan kinematica (basisbewegingen) die de gecontroleerde beweging van de robot definiëren worden ondersteund in de iguverse. Naast de voorgeconfigureerde kinematica kunnen er nog maximaal drie kinematisch onafhankelijke assen geconfigureerd worden in IRC. Voorgeconfigureerde kinematica zijn onder andere:
- 2-assige en 3-assige deltarobots
- Portaalrobots,
- 2-assig (X- en Y-as)
- 2-assig (Y- en Z-as)
- 3-assig (X-, Y- en Z-as)
- Robotarmen (cobots),
- 3-assig (as 1, 2, 3)
- 3-assig (as 2, 3, 4)
- 4-assig (as 1, 2, 3, 4)
- 4-assig (as 2, 3, 4, 5)
- 5-assig (as 1 tot 5)
- 6-assig (as 1 tot 6)
- 4-assige SCARA-robot
Eenvoudige programmering voor voordelige automatisering
Igus-robots en de IRC zijn ontworpen om goedkope automatisering te ondersteunen. Dat zou niet mogelijk zijn zonder een gebruiksvriendelijke programmeerinterface. Met een muis met 3 knoppen of een gamepad kun je een robot in de iguverse verplaatsen en positioneren. Met de IRC-software kan een gebruiker alle assen van de digitale tweeling in de 3D-interface vrij bewegen. Een teach-in functie ondersteunt de ontwikkeling van robotbesturingssoftware, zelfs zonder dat er een fysieke robot is aangesloten.
Om teach-in te implementeren, beweegt de gebruiker de virtuele robot handmatig naar de gewenste positie en definieert hij hoe hij daarheen beweegt. Dit proces wordt herhaald totdat het volledige bewegingsprofiel is aangemaakt. Met het gereedschapscentrum in de IRC-software kunnen gebruikers eenvoudig bijpassende eindeffectoren toevoegen, zoals grijpers, en wordt het middelpunt van het gereedschap automatisch aangepast op de robot. Bovendien kan een verbinding met een industrieel besturingssysteem van een hoger niveau worden toegevoegd.
Het proces begint met het activeren van de robot met de knoppen "aansluiten", "resetten" en "inschakelen" zoals nodig in de interface. De status-LED op de IRC moet groen worden en de status moet "Geen fout" aangeven. Het bewegingsprofiel kan nu worden ingevoerd via het tabblad "Jogging" (Afbeelding 2).
 in the iguverse immersive development environment (click to enlarge)") Afbeelding 2: Het tabblad "Joggen" (linksonder) in de iguverse immersieve ontwikkelomgeving kan worden gebruikt om bewegingsprofielen in te voeren. (Bron afbeelding: Igus)
Afbeelding 2: Het tabblad "Joggen" (linksonder) in de iguverse immersieve ontwikkelomgeving kan worden gebruikt om bewegingsprofielen in te voeren. (Bron afbeelding: Igus)
Portaalrobots
Portaalrobots, zoals die in de voorgaande voorbeelden van de iguverse, bestaan uit twee X-assen, een Y-as en een optionele Z-as. De Y-as is verbonden met de twee parallelle X-assen en beweegt heen en weer in de tweedimensionale ruimte. De optionele Z-as ondersteunt een derde dimensie van beweging.
Portaalrobots van Igus hebben zelfsmerende kunststof voeringen die soepeler en stiller glijden en rollen dan traditionele ontwerpen op basis van kogellagers. Het nieuwe ontwerp is lichter, corrosiebestendig en onderhoudsvrij, wat belangrijke kwaliteiten zijn voor KMO's. Ook cruciaal voor KMO's is dat deze robots tot 40% minder kosten dan traditionele portaalrobots, waardoor de investering sneller wordt terugverdiend.
Deze robots zijn geschikt voor twee soorten toepassingen: lage snelheden met hoge belastingen of hoge snelheden met lage belastingen. Representatieve toepassingen zijn onder meer verpakken, verzamelen en plaatsen, etiketteren, intern transport en assemblage.
Ze worden aangeboden in verschillende maten. Beschikbare accessoires zijn koppelingen, eindeffectoren en motorflenzen. Voorbeelden van middelgrote portaalrobots zijn:
- DLE-FG-0006-AC-650-650 is een tweedimensionaal vlak portaal met een werkruimte van 650 x 650 mm. Deze robot kan lasten tot 8 kg hanteren en heeft een dynamische snelheid tot 20 picks per minuut.
- DLE-RG-0012-AC-800-800-500 is een driedimensionaal portaal met een werkruimte van 800 x 800 x 500 mm. Het kan ladingen tot 10 kg hanteren met een dynamische snelheid tot 20 picks per minuut.
Bekwaamheid in palletiseren
Het palletiseren van producten voor verzending is een alledaagse activiteit in productie en logistiek. Het nieuwste en grootste lid van het iguverse is de XXL grote portaalrobot met een werkruimte van 2.000 x 2.000 x 1.500 mm, zeer geschikt voor palletiseertoepassingen tot 10 kg. Aangepaste ontwerpen met werkruimten tot 6.000 x 6.000 x 1.500 mm zijn verkrijgbaar.
Deze portaalrobots kunnen onderdelen tot 10 kg oppakken, ze transporteren met een snelheid tot 500 mm/s en ze op een pallet plaatsen met een herhaalbaarheid van 0,8 mm (Afbeelding 3). De Igus-palletiseerrobotoplossing kost tot 60% minder dan vergelijkbare systemen.
 Afbeelding 3: Palletiseren is een veelvoorkomende en belangrijke activiteit in productie en logistiek en kan worden geautomatiseerd met een portaalrobot. (Bron afbeelding: Igus)
Afbeelding 3: Palletiseren is een veelvoorkomende en belangrijke activiteit in productie en logistiek en kan worden geautomatiseerd met een portaalrobot. (Bron afbeelding: Igus)
Deltarobots
Net als portaalrobots zijn deltarobots verkrijgbaar met twee of drie assen. Deltarobots hebben een koepelvormig werkbereik boven de werkruimte. Ze hebben uitzonderlijk hoge snelheden en worden vaak gebruikt voor materiaaltransport en het plaatsen van onderdelen. Voorbeelden van Igus-deltarobots zijn:
- RBTX-IGUS-0047 is een drieassig ontwerp met een werkruimte van 660 mm diameter. Het heeft een nauwkeurigheid van ±0,5 mm, een maximale nuttige last van 5 kg, een maximale snelheid van 0,7 m/s en kan tot 30 picks per minuut uitvoeren. (Afbeelding 4).
- RBTX-IGUS-0059 is een 2-assig ontwerp met een werkruimte van 700 mm diameter. Het heeft ook een nauwkeurigheid van ±0,5 mm. Het maximale laadvermogen is 5 kg, de maximale snelheid is 2 m/s en hij kan tot 50 picks per minuut uitvoeren.
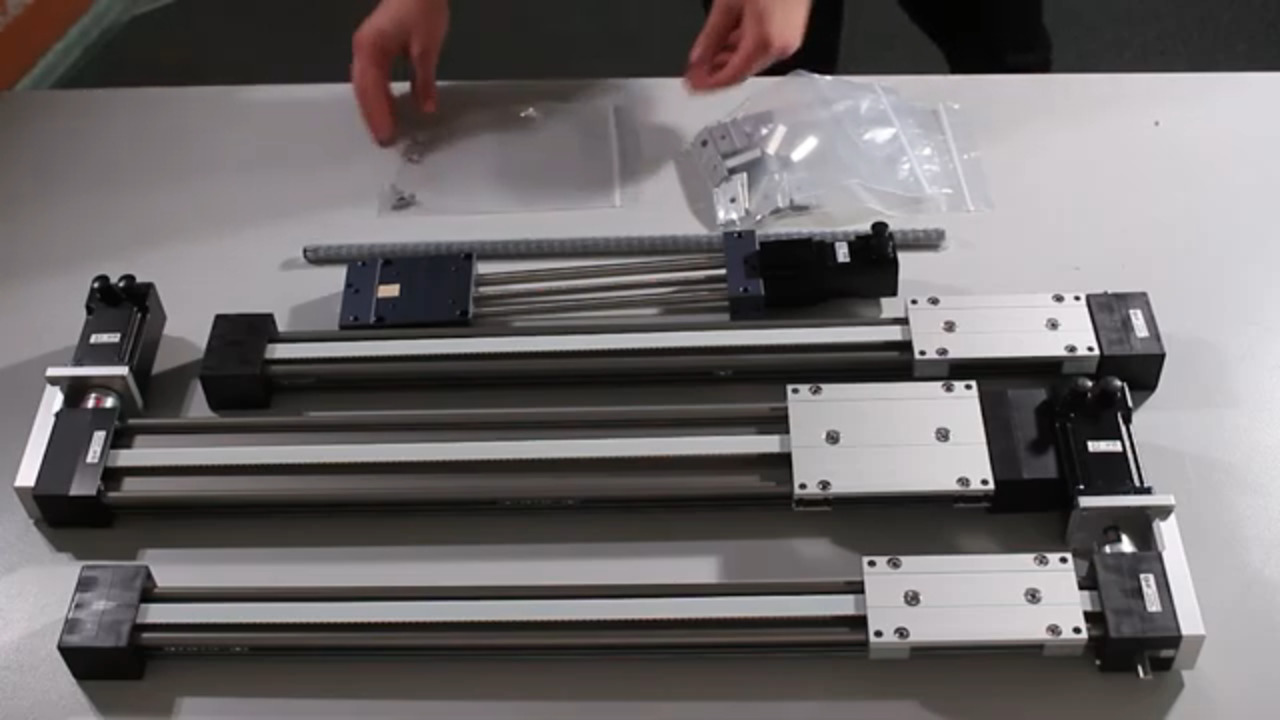
 Afbeelding 4: Voorbeeld van een drieassige deltarobot naast een Igus iRC (links). (Bron afbeelding: DigiKey)
Afbeelding 4: Voorbeeld van een drieassige deltarobot naast een Igus iRC (links). (Bron afbeelding: DigiKey)
Knikarm cobots
De iguverse ondersteunt ook cobots met scharnierende armen. Cobots kunnen twee tot 10 of meer assen hebben, ook wel vrijheidsgraden (DOF) genoemd. Ze hebben over het algemeen een groot werkbereik en kunnen complexe taken uitvoeren in samenwerking met een persoon. Igus-model REBEL-6DOF-02 heeft 6 DOF en model REBEL-4DOF-02 heeft 4 DOF. Beide hebben een nauwkeurigheid van ±1 mm, een nominaal werkbereik van 400 mm en kunnen minimaal 7 picks per minuut uitvoeren met een lineaire snelheid van 200 mm/s.
Het 6 DOF-model heeft een maximaal laadvermogen van 2 kg en een maximaal bereik van 664 mm. Het 4 DOF-model heeft een maximaal laadvermogen van 3 kg en een maximale reikwijdte van 495 mm (Afbeelding 5).
 and 6 DOF (right)") Afbeelding 5: Gelede arm cobots met 4 DOF (links) en 6 DOF (rechts). (Bron afbeelding: Igus)
Afbeelding 5: Gelede arm cobots met 4 DOF (links) en 6 DOF (rechts). (Bron afbeelding: Igus)
Samenvatting
De iguverse immersieve industriële metaverse combineert digital twins en VR om tools te bieden die een snelle ontwikkeling en inzet van robotoplossingen mogelijk maken. Het is gratis, licentievrij en ontworpen om lokaal op een pc te draaien zonder cloudverbinding. Het kan gebruikt worden om robotoplossingen te ontwikkelen en te testen zonder dat er een robot aanwezig is.
Het ondersteunt een brede waaier aan kinematica in deltarobots, portaalrobots, robotarmen (cobots) en SCARA-robots. De IRC bevat een reeks interfaces voor ondersteuning van automatisering en operationele behoeften, waaronder PLC-interface, Modbus TCP/IP, CRI Ethernet, ROS-interface, een interface voor objectdetectiecamera's en een cloudinterface. De iguverse, de iRC en aanverwante robots van Igus zijn geoptimaliseerd om te voorzien in de behoeften van kleine en middelgrote bedrijven op het gebied van voordelige automatisering.
Disclaimer: The opinions, beliefs, and viewpoints expressed by the various authors and/or forum participants on this website do not necessarily reflect the opinions, beliefs, and viewpoints of DigiKey or official policies of DigiKey.