Nieuwe piëzo-elektrische actuatoren brengen verbeterde haptische feedback naar draagbare touchscreen-ontwerpen
Bijgedragen door De Noord-Amerikaanse redacteurs van DigiKey
2020-02-13
Touchscreen gebruikersinterfaces worden alomtegenwoordig vanwege hun duidelijke voordelen ten opzichte van mechanische interfaces. Voor consumenten is de interface glad en intuïtief, en voor industriële gebruikers vermijdt een verzegeld scherm problemen met het binnendringen van vuil en vocht. Maar er zijn nadelen voor beide groepen gebruikers. Zo kunnen consumenten het gemak en de tevredenheid missen die voortkomen uit de klik van een mechanische schakelaar, terwijl industriële gebruikers moeite kunnen hebben om een druk op een knop te bevestigen als ze het touchscreen met een handschoen bedienen.
Haptische feedback, waarbij trillingen de werking van knoppen aangeven, is gebruikt om het gebrek aan gevoel van touchscreens te verhelpen, maar bestaande oplossingen hebben de neiging om gebruik te maken van omvangrijke en complexe mechanische systemen. Deze omvatten excentrisch roterende massa (ERM) vibratiemotoren en lineaire resonantieactuators (LRAs). Piëzo-elektrische haptische feedback biedt een compacter en flexibeler alternatief. Tot voor kort maakten de hoge bedrijfsspanningen het echter moeilijk om het te gebruiken in toepassingen met een laag stroomverbruik - een cruciale vereiste voor eindproducten die op batterijen werken.
De vooruitgang op het gebied van piëzo-elektrische "high definition" haptische oplossingen richt zich echter niet alleen op het stroomverbruik, maar brengt ook andere voordelen met zich mee voor het ontwerp van de haptische interfaceoals een compacte, laag geprofileerde vormfactor; hoge krachtfeedback; en een snelle reactietijd.
In dit artikel worden de voordelen van nieuwe piëzo-elektrische haptische actuatoren ten opzichte van ERM's en LRAs kort toegelicht, voordat een nieuwe generatie apparaten wordt geïntroduceerd die gebaseerd is op meerlagige structuren en bipolaire rijmodi en die samen met efficiënte en specifieke stuurprogramma's een antwoord biedt op eerdere problemen met betrekking tot het stroomverbruik. Het artikel laat vervolgens zien hoe een ingenieur voordeel kan halen uit deze actuators en drivers in zijn volgende haptische feedback op het touchscreen aan de hand van haptische voorbeelden van TDK en drivers van Boréas Technologies en Texas Instruments (TI).
Haptische feedbackopties
Ontwerpers die haptische feedback willen toevoegen aan hun touchscreen interface hebben drie opties om uit te kiezen: ERM's, LRAs en piëzo-elektrische actuators. Alle drie werken ze door hetzelfde basisprincipe toe te passen, waarbij een microcontroller de werking controleert en een een actuator aanstuurt om trillingen te genereren (Afbeelding 1). De verschillen zitten hem in de manier waarop die trilling ontstaat: het ERM gebruikt een off-center roterend gewicht, de LRA gebruikt een magnetisch gewicht dat door spiraalveren wordt opgehangen, en het piëzo-elektrische apparaat vertrouwt op het (omgekeerde) piëzo-elektrische effect dat een verandering in de afmetingen van een kristal- of keramisch object veroorzaakt wanneer het aan een elektrisch veld wordt blootgesteld.
 Afbeelding 1: Haptische touchscreensystemen bestaan uit een microcontroller, driver en actuator. In dit voorbeeld is de actuator een piëzo-elektrisch apparaat, maar ERM's en LRAs zijn populaire alternatieven. (Bron afbeelding: Boréas Technologies)
Afbeelding 1: Haptische touchscreensystemen bestaan uit een microcontroller, driver en actuator. In dit voorbeeld is de actuator een piëzo-elektrisch apparaat, maar ERM's en LRAs zijn populaire alternatieven. (Bron afbeelding: Boréas Technologies)
ERM's en LRAs zijn populair gebleken voor draagbare ontwerpen, vooral omdat ze een laagspanningsoptie (ongeveer 3 volt) bieden en een eenvoudig driverontwerp vereisen. Daarentegen vereisen conventionele piëzo-elektrische apparaten veel hogere spanningen (tot 200 volt) om voldoende mechanische vervorming te genereren voor een goede consumentenervaring. Deze hoge voltages zijn nodig omdat de conventionele piëzo-elektrische haptische drivertechnologie meestal gebaseerd is op de technologie van de verkleinde audioversterker, in plaats van dat deze vanaf de grond is ontworpen met een laag vermogen in gedachten. Een bijkomende ontwerpuitdaging was het gebrek aan speciale haptische aandrijvingen met een laag vermogen, waardoor ontwerpers gedwongen werden om zich te richten op minder efficiënte oplossingen.
Een belangrijk voordeel van piëzo-elektrische oplossingen is echter dat ze high definition haptics ondersteunen die de feedback verbeteren, naast de eenvoudige monotone trillingen. Piëzo-elektrische actuatoren kunnen bijvoorbeeld trillingen produceren die variëren in frequentie en amplitude en kunnen worden gebruikt om verschillende resultaten aan te geven van het indrukken van een enkele knop (Afbeelding 2).
") Afbeelding 2: Piëzo-elektrische haptische aandrijvingen maken een reeks van trillingen mogelijk die kunnen worden gebruikt om verschillende resultaten aan te geven van het activeren van een enkele knop. (Bron afbeelding: Boréas Technologies)
Afbeelding 2: Piëzo-elektrische haptische aandrijvingen maken een reeks van trillingen mogelijk die kunnen worden gebruikt om verschillende resultaten aan te geven van het activeren van een enkele knop. (Bron afbeelding: Boréas Technologies)
Samenvattend, high definition haptic feedback oplossingen vereisen:
- Brede bandbreedte: om een scala aan trillingsfrequenties en -modi mogelijk te maken
- Hoge versnelling [g]: voor een sterkere feedbackkracht
- Grote verplaatsing: waardoor de haptische terugmeldingsgevoeligheid toeneemt
- Lage latentie: snelle reactietijd vergroot het bereik van de feedback
Tabel 1 geeft een overzicht van de prestaties van elk van de haptische feedbackoplossingen en toont aan dat piëzo-elektrische oplossingen de enige keuze zijn voor high definition-toepassingen omdat ze de vereiste combinatie van bandbreedte, feedbackkracht en -gevoeligheid, en latentie bieden.
|
Tabel 1: Vergelijking van operationele kenmerken van haptische feedbackoplossingen. Piëzo-elektrische apparaten bieden de goede acceleratie (gemeten in 'g' waarbij 1 g de acceleratie is door de zwaartekracht aan het aardoppervlak (9,81 m/s2)), verplaatsing en reactietijd, en aangepaste golfvormen die nodig zijn voor high definition haptische feedback. (Afbeelding bron: DigiKey, via auteur)
Merk op dat een deel van de extra driver-complexiteit voor piëzo-elektrische actuatoren het gevolg is van de extra functionaliteit die nodig is om de aangepaste golfvormen te genereren die de definitie en de context van de haptische feedback brengen. ERM en LRA kunnen geen aangepaste golfvormen ondersteunen zodat de drivers eenvoudiger zijn.
Voordelen van nieuwe piëzo-elektrische haptische feedbackapparaten
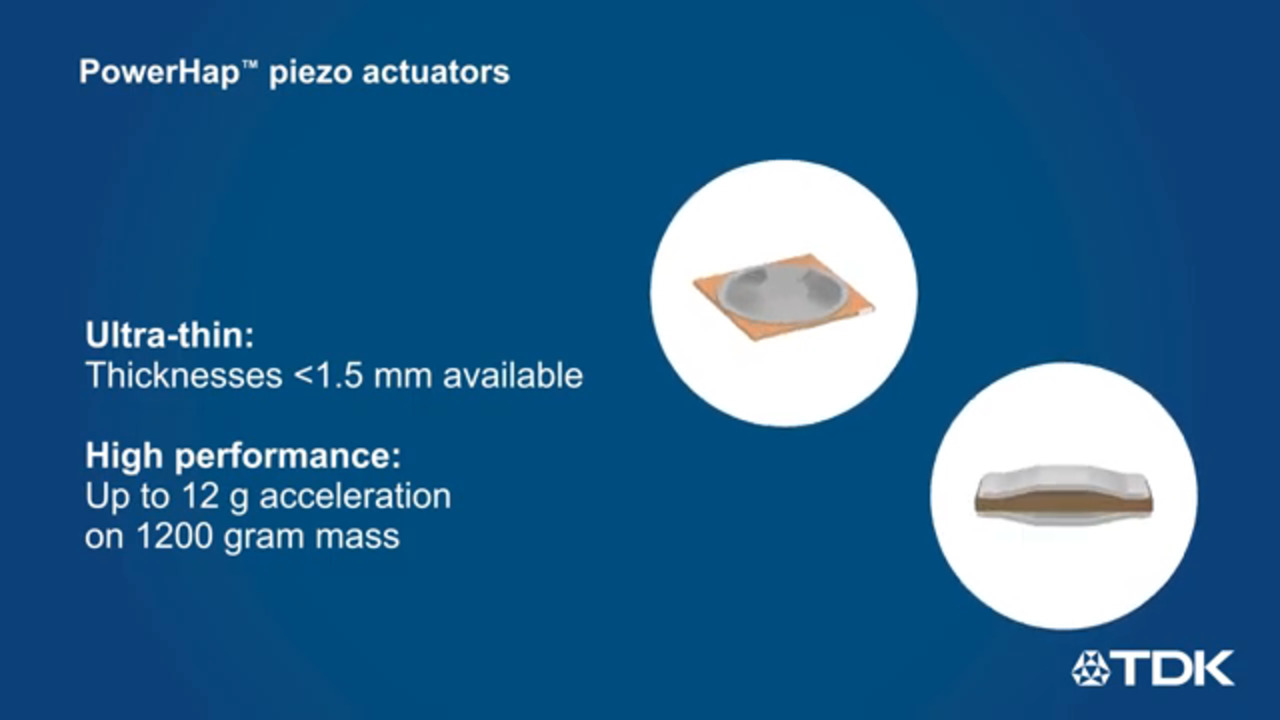
Recente productintroducties voor zowel piëzo-elektrische actuatoren als efficiënte, toegewijde drivers hebben de technologieën tot een veel betere oplossing gemaakt voor producten die op batterijen werken. Zo zijn bijvoorbeeld recentelijk geïntroduceerde piëzo-elektrische haptische producten zoals TDK's PowerHap B54102H1020A001 (12,7 vierkante millimeter (mm2) oppervlak) en B54101H1020A001 (26 mm2) minder dan 2,5 mm hoog en maken ze gebruik van een meerlaagse structuur in plaats van de eenlaagse structuur die wordt gebruikt door apparaten die zijn gebaseerd op audioversterkertechnologie. Deze meerlaagse structuur verlicht de eisen tot op zekere hoogte door de spanning te verlagen (tot tussen 60 en 120 volt).
Elke laag van TDK's meerlaagse product breidt slechts een kleine hoeveelheid uit in de 'z'-richting door het omgekeerde piëzo-elektrische effect. Omdat het piëzo-elektrische apparaat echter een constant volume moet behouden, krimpen de lagen tegelijkertijd in de 'x'- en 'y'-dimensie.
Het TDK-product versterkt deze samentrekking mechanisch met behulp van een paar bekkens aan elk uiteinde van het piëzo-elektrische apparaat om de z-asbeweging met een factor 15 te verhogen, waardoor een verplaatsing van 35 tot 65 micrometer (µm) wordt bereikt, afhankelijk van het model ( 3). Onder een belasting van 100 gram (g) (unipolaire werking, enkele sinuspuls, 200 Hz) bereikt de grotere TDK-actuator een versnelling van 30 g piek tot piek na slechts 1 milliseconde (ms). Het frequentiebereik van 1 tot 1000 hertz (Hz) stelt ontwerpers in staat om op maat gemaakte haptische feedbackprofielen met hoge definitie te ontwikkelen.
 Figuur 3: TDK piëzo-elektrische haptische actuatoren gebruiken een meerlagige structuur en bekkens om de z-asbeweging te versterken. (Bron afbeelding: TDK)
Figuur 3: TDK piëzo-elektrische haptische actuatoren gebruiken een meerlagige structuur en bekkens om de z-asbeweging te versterken. (Bron afbeelding: TDK)
De TDK piëzo-haptische actuators kunnen zowel in eenpolige als in bipolaire modus werken. Bij eenpolige werking wordt een positieve spanning over de actuator gezet, terwijl bij bipolaire werking de spanning varieert tussen de positieve en negatieve piekwaarden. Het voordeel van bipolaire werking is dat een grotere verplaatsing kan worden bereikt voor dezelfde piek-tot-piekspanning, of een gelijke verplaatsing kan worden bereikt met een lagere piek-tot-piekspanning. Het nadeel is dat de bipolaire werking de mechanische en elektrische belasting van de aandrijving verhoogt (Afbeelding 4).
 offers the same mechanical displacement as unipolar") Afbeelding 4: Bipolaire werking (rechts) biedt dezelfde mechanische verplaatsing als unipolair, maar dan met een lagere piek-tot-piekspanning. (Bron afbeelding: TDK)
Afbeelding 4: Bipolaire werking (rechts) biedt dezelfde mechanische verplaatsing als unipolair, maar dan met een lagere piek-tot-piekspanning. (Bron afbeelding: TDK)
Siliconenleveranciers hebben onlangs ook driverchips onthuld die speciaal zijn ontworpen voor haptische terugkoppelingstoepassingen. Deze verbeterde ontwerpen zijn in staat om een scala aan trillingsmodi te produceren over een goed frequentiebereik en bieden unipolaire of bipolaire aandrijfkarakteristieken terwijl ze op een veel hoger rendement werken dan de vorige ontwerpen. Voorbeelden hiervan zijn de BOS1901CQT piëzo-haptische driver van Boréas Technologies en de DRV2667 motor power driver van Texas Instruments.
Het IC van de Boréas Technologies is een piëzo-aandrijving met één chip die gebruik maakt van energieterugwinningstechnologie en in staat is om meerdere trillingssignalen te genereren. De chip kan actuators met maximaal 190 Voltpk-pk van een 3 tot 5,5 Volt voeding aandrijven. De BOS1901 maakt gebruik van een snelle seriële periferie-interface (SPI) en alle instellingen zijn instelbaar via de digitale front-end. De typische opstarttijd van minder dan 300 microseconden (μs) vertaalt zich in een lage latency.
De TI-chip is een piëzo-elektrische haptische driver met een geïntegreerde 105 volt boost-schakelaar en digitale front-end die zowel hoog- als laagspanningsactuators kan aansturen. De digitale front-end ontlast de microprocessor van het genereren van pulsbreedtemodulatie (PWM) of de behoefte aan extra analoge kanalen in het hostsysteem. De chip bevat speciaal geheugen om golfvormen op te slaan en terug te roepen, evenals een geavanceerde golfvormsynthesizer. Een typische opstarttijd van 2 ms beperkt de latentie en een thermische overbelastingsbeveiliging voorkomt dat het apparaat wordt beschadigd als het te veel wordt aangedreven.
Piëzo-haptisch systeemontwerp
Zowel de Boréas- als de TI-chips zijn ontworpen om te werken in een systeem met aanraakfunctionaliteit dat al een applicatieprocessor bevat. De processor activeert de uitvoering van de haptische feedback via een SPI. Als alternatief kan de ontwerper een analoge ingang gebruiken om haptische effecten te activeren (Afbeelding 5).
 Afbeelding 5: Toepassingscircuit met de TI DRV2667-motoraandrijving. Haptische gebeurtenissen worden geactiveerd door de touchscreen applicatieprocessor met de TI-chip en drijven vervolgens het piëzo-elektrische haptische apparaat aan. (Bron afbeelding: Texas Instruments)
Afbeelding 5: Toepassingscircuit met de TI DRV2667-motoraandrijving. Haptische gebeurtenissen worden geactiveerd door de touchscreen applicatieprocessor met de TI-chip en drijven vervolgens het piëzo-elektrische haptische apparaat aan. (Bron afbeelding: Texas Instruments)
Door de mate van integratie van de nieuwste drivers is het ontwerp van touchscreensystemen met piëzo-elektrische haptische terugkoppeling gemakkelijker gemaakt, maar sommige componentkeuzes zijn belangrijk voor het optimaliseren van de prestaties van het ontwerp. Zo moet de boost-spanning (BST) 5 volt hoger zijn dan de piekspanning waaraan de piëzoactuator wordt blootgesteld. Dit maakt een zekere mate van overhead van de versterker mogelijk en wordt ingesteld met behulp van het weerstandsdeler-netwerk R1/R2 dat in Afbeelding 5 is weergegeven.
De formule voor het berekenen van de weerstandswaarden is: V(BST) = V(FB) x (1 + R1/R2), waarbij V(FB) = 1,32 volt.
Om bijvoorbeeld de maximale V(BST)-capaciteit van de TI-driver van 105 volt te bereiken, zouden de R1- en R2-waarden respectievelijk 768 kilohm (kΩ) en 9,76 kΩ kunnen zijn.
De piekbooststroom wordt via de inductor L1 door de voeding getrokken. Deze stroom wordt bepaald door R(EXT), maar er moet voorzichtig te werk worden gegaan om een inductor te selecteren die de geprogrammeerde stroomlimiet (ILIM) aankan. De relatie tussen R(EXT) en ILIM wordt bepaald door de formule:
![]()
Waarbij K = 10.500, VREF = 1,35 volt, RINT (de interne weerstand van de bestuurder) = 60 Ω en ILIM = de piekstroomgrens van L1.
De keuze van de inductor is belangrijk om de beste prestaties van de te garanderen. In het geval van de TI-chip variëren de aanbevolen inductanties van 3,3 tot 22 microhenries (μH). De afweging is of men kiest voor een grotere inductantie om de schakelverliezen van de boostconverter te verlagen of voor een kleinere inductantie om de uitgangsstroom te maximaliseren.
De belangrijkste elektrische specificaties voor de piëzo-haptische actuator vanuit het oogpunt van de driver zijn de spanningswaarde en de capaciteit. Bij de maximale frequentie van de TI-driver van 500 Hz is het apparaat bijvoorbeeld geoptimaliseerd om tot 50 nanofarads (nF) aan te sturen bij 200 voltpk-tot-pk (het hoogste spanningsbereik van de driver). De chip kan grotere capaciteiten aansturen als de geprogrammeerde verhogingsspanning wordt verlaagd en/of de gebruiker het ingangsfrequentiebereik beperkt tot bijvoorbeeld 300 Hz.
Een andere belangrijke keuze van de component is de boostcondensator (C(BST)). De condensator moet ten minste een spanning hebben die gelijk is aan die van de boost-spanning en bij voorkeur hoger is. Zo wordt bijvoorbeeld een 250 voltcondensator van het type X5R of X7R aanbevolen wanneer de TI-chip op de maximale boost-spanning van 105 volt draait. C(BST) moet een minimale werkcapaciteit hebben van ten minste 50 nF. Voor V(BST) van 30 tot 80 volt is een condensator van 100 volt en 100 nF aanvaardbaar en voor V(BST) minder dan 30 volt wordt een condensator van 50 volt en 0,22 microfarad (μF) aanbevolen.
Het gebruik van een bulkcondensator (CBULK) die naast de inductor wordt geplaatst, wordt aanbevolen in verband met de vereiste schakelpinstroom. Een keramische condensator van het type X5R of X7R met een capaciteit van ten minste 1 μF wordt aanbevolen.
Ontwikkelingstools
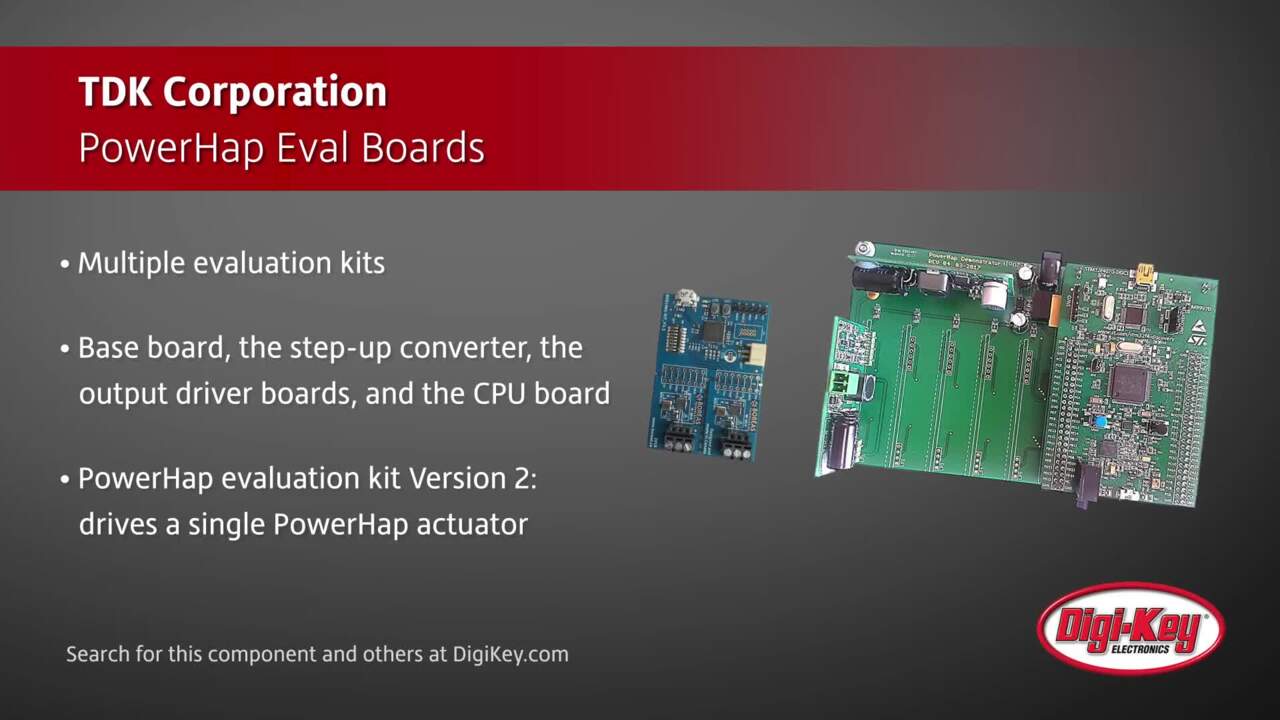
Voor ingenieurs die willen experimenteren met de mogelijkheden van TDK's piëzo-elektrische haptische actuators voordat ze zich op de hardware vastleggen, biedt het bedrijf de eenkanaals Z63000Z2910Z 1Z 1 PowerHap-evaluatiekit aan. De kit bestaat uit een basiskaart, een step-up converter, een uitgangsdriverboard en een microcontrollerboard.
De kit wordt geleverd met configuratiesoftware die op een PC met Windows 7 (of later) draait. Zodra de software is geladen, wordt de kit via een USB-kabel aangesloten op de PC en gevoed door het toepassen van 12 volt (DC). De software biedt dan een interface om de haptische reactie van de actuator te configureren wanneer deze wordt ingedrukt. De interface maakt het mogelijk de volgende signaalparameters te configureren (Afbeelding 6):
- Amplitude - 5 tot 100 procent (115 volt)
- Frequentie - 20 tot 300 Hz
- Golfvorm (trapeziumvormige, sinusvormige vierkante golf, zaagtand)
- Trapeziumvormige gebruikscyclus - 35 tot 75 procent.
- Pulsaantal - 1 tot 1000
- Triggerniveau - 0 tot 12 volt (hoe lager het triggerniveau, hoe harder de aandrijving moet worden ingedrukt om het signaal te activeren)
- Vertragingstijd (gedurende welke geen kracht wordt gedetecteerd door de actuator)
 Afbeelding 6: De TDK PowerHap evaluatiekit software presenteert een signaalconfiguratie-interface. Eenmaal ingesteld kan de configuratie naar de processor van het evaluatiebord worden verzonden via de knop "Transmit configuration". (Bron afbeelding: TDK)
Afbeelding 6: De TDK PowerHap evaluatiekit software presenteert een signaalconfiguratie-interface. Eenmaal ingesteld kan de configuratie naar de processor van het evaluatiebord worden verzonden via de knop "Transmit configuration". (Bron afbeelding: TDK)
De software stelt de ingenieur ook in staat om aangepaste golfvormen te creëren. Zodra de software is geconfigureerd, wordt de informatie via de USB-kabel naar de processor van de kit gestuurd.
Een tweede evaluatiekit, de PowerHap Z63000Z2910Z1Z44, is speciaal ontworpen voor ingenieurs die gebruik maken van de Boréas BOS1901CQT piëzo-haptische driver. Deze kit bevat een basiskaart, een step-up converter, twee drivers en een microcontroller. De basis wordt geleverd met één TDK piëzo-elektrische haptische actuator (Afbeelding 7).
 Afbeelding 7: TDK's Z63000Z2910Z1Z44 PowerHap-evaluatiekit maakt gebruik van piëzo-drivers van Boréas en voldoet aan het USB-audioprotocol, waardoor de configuratie wordt vereenvoudigd. (Bron afbeelding: TDK)
Afbeelding 7: TDK's Z63000Z2910Z1Z44 PowerHap-evaluatiekit maakt gebruik van piëzo-drivers van Boréas en voldoet aan het USB-audioprotocol, waardoor de configuratie wordt vereenvoudigd. (Bron afbeelding: TDK)
Het bord is aangesloten op een PC via een USB-kabel, maakt gebruik van het standaard USB-audioprotocol en verschijnt als een normale audio-uitgang naar een willekeurige computer. Waveform-prototyping (tot 190 voltpk-to-pk) en afspelen kan worden uitgevoerd met behulp van het USB-audioprotocol tot prototype haptische effecten in software zoals MATLAB, Python en Audacity.
Conclusie
Haptische feedback met behulp van piëzo-elektrische, ERM- en LRA-actuators heeft een verbeterde touchscreenbediening in zowel consumenten- als industriële toepassingen. Echter, de vooruitgang in de richting van lagere spanning, compacte piëzo-elektrische haptische actuators hebben de voordelen van high definition haptische terugkoppeling uitgebreid naar apparaten die op batterijen werken.
Tegelijkertijd is het ontwerp van piëzo-elektrische haptische systemen vergemakkelijkt door de introductie van speciale drivers die een interface vormen met populaire applicatieprocessoren en ondersteuning bieden voor een breed scala aan golfvormen. De beschikbaarheid van evaluatiekits voor deze apparaten van leveranciers zoals TDK maakt het mogelijk om te experimenteren en prototypes te maken voordat er een hardwareontwerp wordt gemaakt.
Disclaimer: The opinions, beliefs, and viewpoints expressed by the various authors and/or forum participants on this website do not necessarily reflect the opinions, beliefs, and viewpoints of DigiKey or official policies of DigiKey.