Wat zijn de belangrijkste overwegingen bij het beoordelen van cobotveiligheid?
Bijgedragen door De Noord-Amerikaanse redacteurs van DigiKey
2024-04-03
Collaboratieve robots (cobots) zijn ontworpen om met mensen samen te werken en ondersteunen flexibele productie in Industry 4.0-fabrieken. Vergeleken met traditionele industriële robots zijn cobots eenvoudiger en gemakkelijker in te stellen. Ook vereisen ze geen veilig geïsoleerde werkruimtes. Omdat ze ontworpen zijn om met mensen samen te werken, zijn cobots anders gebouwd dan andere industriële robots, met voorzieningen zoals botsingdetectiesystemen, force feedback, elastische actuatoren en servomotoren met een lage massatraagheid.
Aangezien ze qua ontwerp verschillen, zijn er specifieke veiligheidsnormen ontwikkeld voor cobots. De International Organization for Standardization Technical Specification (ISO/TS) 15066 specificeert veiligheidseisen voor industriële cobots en hun werkomgevingen. Deze zijn een aanvulling op de vereisten en richtlijnen voor het gebruik van cobots in ISO 10218-1 en ISO 10218-2.
Dit artikel geeft een kort overzicht van de vereisten van ISO/TS 15066 en hoe deze aansluiten op ISO 10218-1 en 10218-2. Vervolgens wordt ingegaan op de complexiteit van collaboratie, inclusief hoe de collaboratieve werkruimte wordt gedefinieerd. Daarna worden er factoren besproken die te maken hebben met robotveiligheid, zoals veiligheidsfuncties die zijn ingebouwd in cobots en welke externe veiligheidsfuncties nodig zijn, samen met voorbeelden zoals nabijheidssensoren, lichtschermen en veiligheidscontactmatten. Het artikel eindigt met een korte bespreking van enkele toepassingen die specifiek zijn voor cobotveiligheid.
Er zijn verschillende belangrijke veiligheidsnormen voor industriële robots en cobots. ISO/TS 15066 beschrijft de veiligheidseisen voor industriële cobotsystemen en de werkomgeving. Deze normen zijn geschreven om voort te bouwen op de beperkte eisen in eerdere normen zoals de ISO 10218-serie en deze aan te vullen. ISO 10218-1 richt zich op algemene robots en robotapparaten, terwijl ISO 10218-2 gericht is op robotsystemen en -integratie. American National Standards Institute/Robotics Industry Association (ANSI/RIA) R15.06 is een nationale adoptie van ISO 10218-1 en ISO 10218-2.
Complexiteit van collaboratie
Voordat we ingaan op de details van cobotveiligheid, is het nuttig om eerst collaboratie te definiëren. Collaboratie in robotica is complex en omvat drie factoren:
- Een cobot is een ‘robot die ontworpen is voor directe interactie met een mens binnen een gedefinieerde werkruimte voor collaboratie’, volgens ANSI/RIA R15.06.
- Een collaboratieve handeling is een ‘toestand waarin een doelbewust ontworpen robotsysteem en een operator werken binnen een collaboratieve werkruimte’, volgens ISO/TS 15066.
- Tot slot is een collaboratieve werkruimte de ‘werkruimte binnen de beveiligde ruimte waar de robot en een mens tijdens de productie tegelijkertijd taken kunnen uitvoeren’, volgens ANSI/RIA R15.06.
Het gaat hier vooral om de definitie van de collaboratieve werkruimte ‘binnen de beveiligde ruimte’. De beveiligde ruimte bevat een veiligheidslaag naast de standaard veiligheidsfuncties van de cobot.
Veelgebruikte beschermende functies die in cobots zijn geïntegreerd, zijn onder andere contactdetectiesystemen op basis van koppelmetingen bij elk gewricht, die controleren op onverwachte schokken, obstakels of buitensporige krachten of koppels. Er moeten ook automatische remsystemen en handmatige remontkoppelingen zijn om de arm zonder stroom te kunnen verplaatsen.
Onverwacht contact tussen de cobot en de persoon verdient bijzondere aandacht. De normen schrijven voor dat alle contact met iemands hoofd moet worden voorkomen. Daarnaast verdeelt de norm het lichaam in 29 specifieke gebieden en worden er beperkingen gesteld voor twee soorten contact:
- Voorbijgaand contact is een bewegende, dynamische gebeurtenis waarbij de cobot een persoon raakt. Beperkingen zijn gebaseerd op locatie, traagheid en relatieve snelheid.
- Quasi-statisch contact treedt op wanneer een lichaamsdeel vastzit tussen de cobot en een oppervlak. Beperkingen zijn gebaseerd op druk en kracht gerelateerd aan plet- en klemeffecten.
De specificatie biedt richtlijnen, geen absolute limieten, gebaseerd op overwegingen per toepassing. Er wordt ook gesteld dat de richtlijnen informatief zijn en de huidige ‘best practices’ weerspiegelen, omdat collaboratie tussen mensen en robots een nieuw gebied is en er nog steeds onderzoek wordt gedaan.
Continuïteit van collaboratie
Er is niet één gezamenlijke toepassing. Mensen en cobots kunnen op verschillende manieren met elkaar communiceren en samenwerken. Collaboratieve toepassingen variëren van co-existentie, waarbij een robot onder stroom stopt wanneer een persoon de collaboratieve werkruimte betreedt, tot een interactieve activiteit waarbij de persoon de cobot aanraakt terwijl deze werkt (afbeelding 1).
 Afbeelding 1: Collaboratie tussen mens en robot omvat een breed scala aan mogelijke interactieniveaus. (Bron afbeelding: SICK)
Afbeelding 1: Collaboratie tussen mens en robot omvat een breed scala aan mogelijke interactieniveaus. (Bron afbeelding: SICK)
Om de veiligheidsbehoeften van individuele collaboratietoepassingen vast te stellen, is een risicobeoordeling nodig. Deze omvat het identificeren, evalueren en verminderen van de gevaren en risico's die gepaard gaan met de toepassing. ISO 10218 bevat een lijst met veiligheidsvoorzieningen die geschikt kunnen zijn in verschillende omstandigheden, maar geen definitieve vereisten. ISO/TS 15066 voegt extra details toe aan de risicobeoordelingen van cobots. In elk geval is het doel van de risicobeoordeling het identificeren van externe veiligheidsvoorzieningen en -systemen die nodig zijn om de veilige implementatie van collaboratietoepassingen te garanderen.
Lees het artikel ‘Safely and Efficiently Integrating AMRs into Industry 4.0 Operations for Maximum Benefit’ (Veilig en efficiënt AMR’s integreren in Industry 4.0-activiteiten voor maximaal voordeel) voor meer uitleg over risicobeoordeling en robots.
Bescherming en efficiëntie
Hoewel cobots ontworpen zijn voor veilig gebruik, kunnen extra beschermingslagen de efficiëntie van collaboratietoepassingen verbeteren. Zonder extra veiligheid wordt in ISO/TS 15066 een maximumsnelheid voorgeschreven van 0,25 meter per seconde (m/s) per as wanneer een persoon de collaboratieve werkruimte betreedt. Voor de meeste cobots is dat erg langzaam.
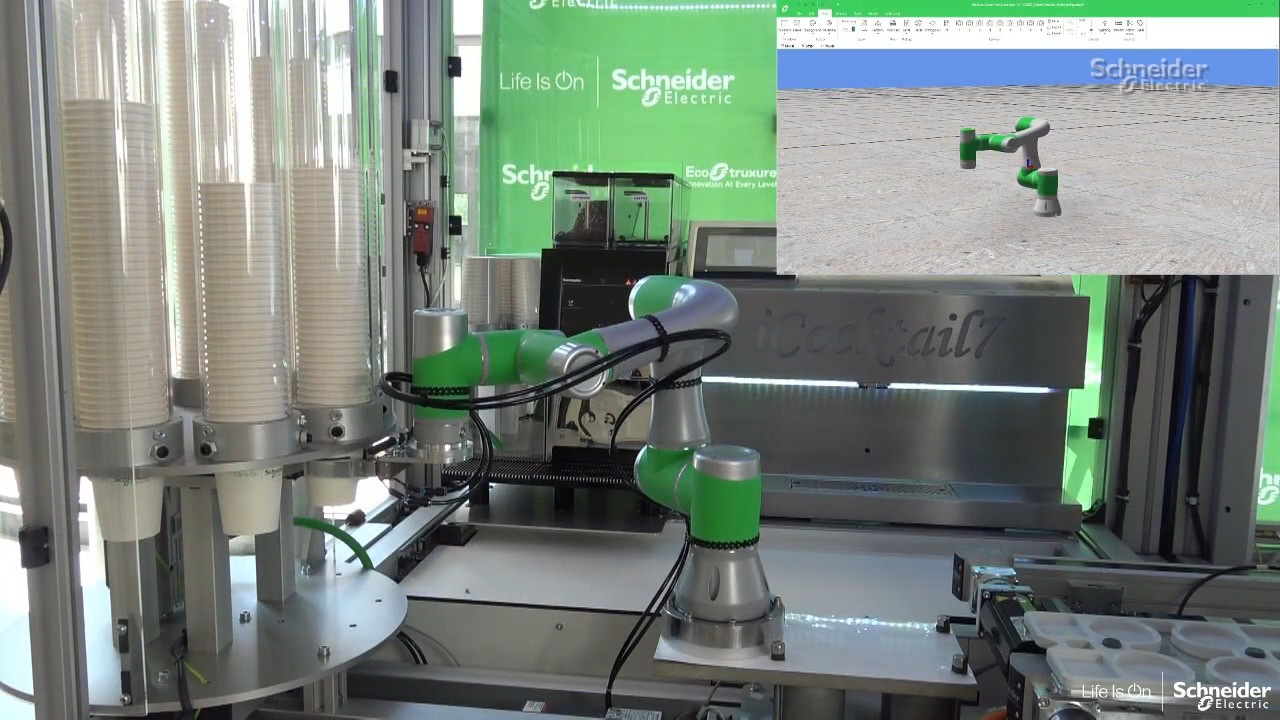
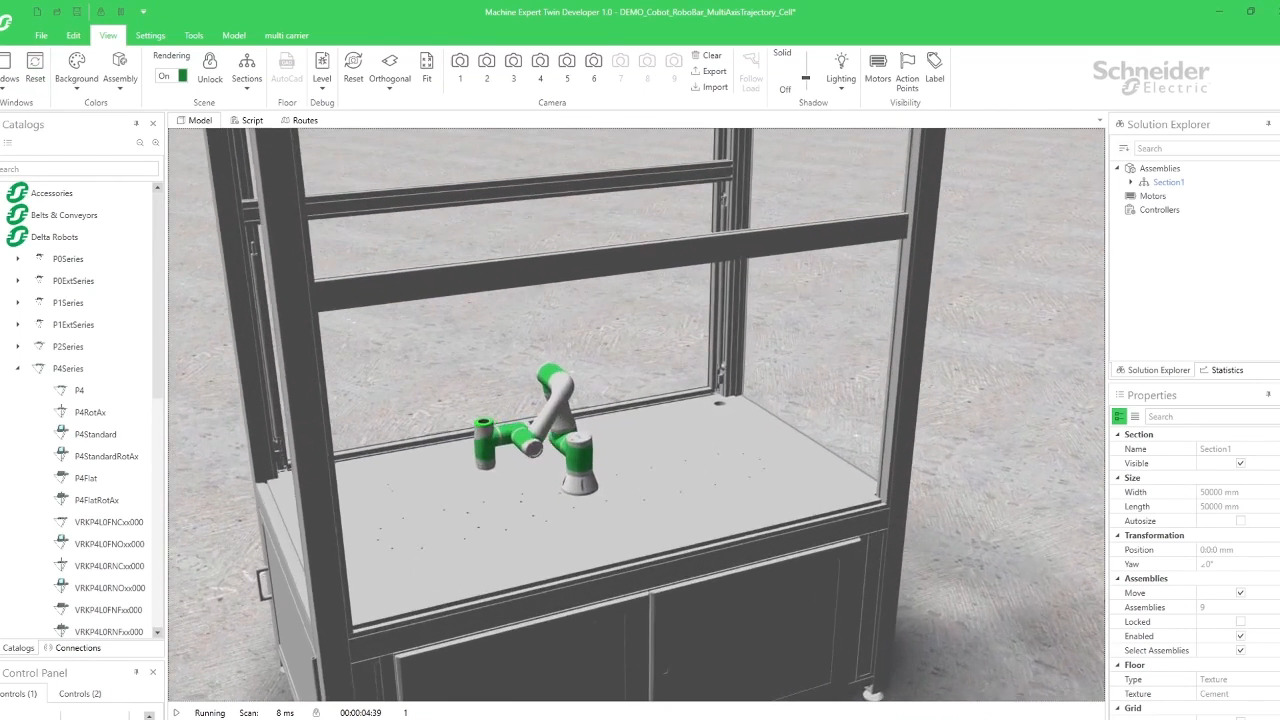
De Lexium cobot LXMRL12S0000 van Schneider Electric heeft bijvoorbeeld een maximaal laadvermogen van 12 kilo (kg), een actieradius (werkbereik) van 1327 millimeter (mm), een positioneringsnauwkeurigheid van ±0,03 mm en een maximale snelheid van het gereedschapseinde van 3 m/s. Dit is 12 keer sneller dan het maximum dat is toegestaan volgens ISO/TS 15066 wanneer een persoon zich in de collaboratieve werkruimte bevindt (afbeelding 2).
 Afbeelding 2: Deze cobot kan 12 keer sneller bewegen dan het maximum dat is toegestaan volgens ISO/TS 15066 wanneer een persoon zich in de collaboratieve werkruimte bevindt. (Bron afbeelding: Schneider Electric)
Afbeelding 2: Deze cobot kan 12 keer sneller bewegen dan het maximum dat is toegestaan volgens ISO/TS 15066 wanneer een persoon zich in de collaboratieve werkruimte bevindt. (Bron afbeelding: Schneider Electric)
Cobots kunnen in veel toepassingen lange tijd alleen werken. Door de aan- of afwezigheid van mensen in de gezamenlijke werkruimte te detecteren, kan er veel sneller en efficiënter worden gewerkt als er niemand aanwezig is. Veelgebruikte apparaten om de aanwezigheid van mensen te detecteren zijn onder andere veiligheidsscanners, lichtschermen en veiligheidscontactmatten. Elke technologie biedt andere voordelen en ze worden vaak gecombineerd gebruikt.
Veiligheidsscanners
Veiligheidsscanners bewaken een aangewezen gebied door de aanwezigheid van mensen te detecteren. Ze kunnen bepalen hoe ver een persoon weg is en verschillende waarschuwingszones implementeren naast de actieve veiligheidszone.
Het model OS32C-SP1-4M van Omron is een goed voorbeeld van een veiligheidslaserscanner die speciaal is ontworpen voor gebruik met cobots. De scanner heeft een veiligheidsradius tot 4 meter (m) en kan meerdere waarschuwingszones tot 15 m ondersteunen. Hij bevat 70 standaardsets met combinaties van veiligheidszones en waarschuwingszones voor gecompliceerde werkomgevingen. Bovendien kan de minimale objectresolutie worden ingesteld op 30, 40, 50 of 70 mm en kan de responstijd variëren van 80 milliseconden (ms) tot 680 ms, waardoor de toepassingsflexibiliteit nog verder toeneemt (afbeelding 3).
 Afbeelding 3: Deze veiligheidsscanner heeft een veiligheidsradius tot 4 m en kan meerdere waarschuwingszones tot 15 m ondersteunen. (Bron afbeelding: DigiKey)
Afbeelding 3: Deze veiligheidsscanner heeft een veiligheidsradius tot 4 m en kan meerdere waarschuwingszones tot 15 m ondersteunen. (Bron afbeelding: DigiKey)
Lichtschermen
Lichtschermen kunnen de aanwezigheid van mensen meten en kunnen ontworpen worden om objecten van verschillende groottes te detecteren, zoals vingers of handen. In tegenstelling tot veiligheidsscanners meten lichtschermen geen afstand. Ze sturen een reeks lichtstralen tussen lineaire zender- en ontvanger-arrays en kunnen detecteren wanneer een object een of meer stralen breekt.
Op het gebied van veiligheidsclassificaties zijn er twee primaire classificaties voor lichtschermen: type 2 en type 4. Deze zien er aan de buitenkant hetzelfde uit, maar bieden verschillende veiligheidsniveaus. Type 4 bewaakt de beveiligde ruimte die een collaboratieve werkruimte definieert. Type 2 lichtschermen zijn ontworpen voor toepassingen met een lager risico.
Lichtschermen bewaken de perimeter en zijn verkrijgbaar met verschillende resolutieniveaus, zoals 14 mm voor vingerdetectie en 24 mm voor handdetectie. Het model, SLC4P24-160P44 van Banner Engineering, is een lichtschermkit van type 4 met een zender- en ontvanger-array. De kit heeft een resolutie van 24 mm om mensen en machines zoals cobots te beschermen (afbeelding 4). De zenders hebben een rij gesynchroniseerde gemoduleerde infrarood lichtemitterende diodes. Ontvangers hebben een overeenkomstige rij gesynchroniseerde fotodetectoren. De zenders hebben een bereik van 2 meter en deze lichtschermen kunnen worden geïnstalleerd in lengtes van 160 tot 320 mm in stappen van 80 mm.
 Afbeelding 4: Dit lichtscherm van type 4 heeft een resolutie van 24 mm. (Bron afbeelding: Banner Engineering)
Afbeelding 4: Dit lichtscherm van type 4 heeft een resolutie van 24 mm. (Bron afbeelding: Banner Engineering)
Veiligheidslaserscanners en lichtschermen bieden contactloze middelen om de veiligheid van werkplekken te verbeteren. Ze kunnen echter moeilijk te gebruiken zijn in optisch veeleisende omgevingen, zoals gebieden met sterk reflecterende oppervlakken die ongewenste lichtstoringen kunnen veroorzaken. Ook kunnen ze zich vergissen door lekkende olie of vet of overmatig stof of vocht.
Sommige van deze optische sensoren hebben gevoeligheidsaanpassingen die bepaalde soorten interferentie kunnen verminderen. Deze gevoeligheidsaanpassingen kunnen ook leiden tot langere reactietijden en andere prestatiecompromissen. Een andere oplossing is het gebruik van een veiligheidscontactmat in combinatie met optische sensoren.
Veiligheidscontactmatten
Veiligheidscontactmatten hebben twee geleidende platen die gescheiden worden door een gerasterde isolatielaag. Ze kunnen alleen of in combinatie met andere soorten sensoren worden gebruikt. Als een persoon op de mat stapt, wordt de bovenste geleidende plaat ingedrukt en maakt deze contact met de onderste plaat, waardoor een waarschuwingssignaal wordt gegenereerd (afbeelding 5). De buitenkant van de matten bestaat uit polyurethaan dat slipvast is en ondoordringbaar voor water, vuil en olie. De SENTIR-mat, model 1602-5533, van ASO Safety Solutions kan tot 10 matten in serie aansluiten op één bewakingseenheid voor een maximale dekking van 10 m2.
 Afbeelding 5: Wanneer iemand op de veiligheidsmat stapt, maken de bovenste en onderste geleidende lagen contact, waardoor er een waarschuwingssignaal wordt gegenereerd. (Bron afbeelding: ASO Safety Solutions)
Afbeelding 5: Wanneer iemand op de veiligheidsmat stapt, maken de bovenste en onderste geleidende lagen contact, waardoor er een waarschuwingssignaal wordt gegenereerd. (Bron afbeelding: ASO Safety Solutions)
Veiligheid zit in de details
Er is niet één enkele formule die veiligheid garandeert. Elke collaboratieve toepassing is anders en moet worden bekeken op basis van de unieke kenmerken en behoeften. Een belangrijke factor is: waar ligt de toepassing op het continuüm van collaboratie (zie afbeelding 1)? Hoe nauwer de interactie tussen de cobot en mensen, hoe meer bescherming er nodig is.
Er zijn ook andere details waarmee rekening moet worden gehouden. Enkele daarvan zijn:
- Voor elke locatie moet een gedetailleerde risicobeoordeling worden uitgevoerd om te zien of de cobot van werkplek naar werkplek is verplaatst. Kleine variaties kunnen een verschil maken in veiligheid, zelfs als ze hetzelfde lijken.
- Als er andere machines in de collaboratieve werkruimte zijn, moeten die dan worden gekoppeld aan het uitschakelsysteem of de veiligheidsvertraging voor de cobot?
- Dit artikel richtte zich op veiligheidsgerelateerde hardware, maar voor netwerksystemen die steeds vaker voorkomen, is cyberbeveiliging een belangrijke overweging om interferentie met de werking van de cobot of de veiligheidssystemen te voorkomen.
Conclusie
Cobotveiligheid is complex. Het begint met het definiëren van de collaboratieve werkruimte binnen de beveiligde ruimte en vereist een risicobeoordeling van de collaboratie. Normen zoals ISO/TS 15066 en de ISO 10218-serie zijn belangrijk en bieden aanbevelingen en richtlijnen. Cobots bevatten basisveiligheidsfuncties zoals botsingdetectiesystemen, force feedback, elastische actuatoren en servomotoren met een lage massatraagheid. Afhankelijk van de specifieke kenmerken van de collaboratieve toepassing kunnen extra veiligheidsvoorzieningen nodig zijn, zoals nabijheidssensoren, lichtschermen en veiligheidscontactmatten.
Disclaimer: The opinions, beliefs, and viewpoints expressed by the various authors and/or forum participants on this website do not necessarily reflect the opinions, beliefs, and viewpoints of DigiKey or official policies of DigiKey.